首頁
關於中心
中心簡介
年度大事紀
媒體露出
組織成員
歷屆主任
中心主管
研究團隊
行政團隊
地理位置
相關法規
最新公告
中心快訊
活動資訊
醫材新知
徵才公告
訪客紀錄
創新研究
重點研究領域
核心實驗室
研究成果
實施場域
論文產出
新創公司
人才培育
NCKU Biodesign
The International Internship Pilot Program (IIPP)
STB Biodesign
MDI醫材國際碩士班
SPARK培訓計畫
phD-ojt培訓就業計畫
RAISE培訓就業計畫
醫材技術人員培訓
醫療器材與系統學程
高階人才專案師資
臺灣人才躍昇計畫
產學合作
產學合作實績
歷年合作計畫
GAIA成功醫材國際產學聯盟
高階生醫影像及臨床AI加值產業創新聯盟
醫療AR/VR國際創新服務聯盟
國際交流
國際合作實績
海外共研基地/中心
東南亞國際培訓課程
求才資訊
填寫徵才表單
職缺列表
聯絡我們
語系
English
首頁
成功大學
English
首頁
關於中心
中心簡介
年度大事紀
媒體露出
組織成員
地理位置
相關法規
最新公告
中心快訊
活動資訊
醫材新知
訪客紀錄
創新研究
重點研究領域
核心實驗室
研究成果
實施場域
論文產出
新創公司
人才培育
NCKU Biodesign
The International Internship Pilot Program (IIPP)
STB Biodesign
MDI醫材國際碩士班
SPARK培訓計畫
phD-ojt培訓就業計畫
RAISE培訓就業計畫
醫材技術人員培訓
醫療器材與系統學程
高階人才專案師資
臺灣人才躍昇計畫
產學合作
產學合作實績
歷年合作計畫
GAIA成功醫材國際產學聯盟
高階生醫影像及臨床AI加值產業創新聯盟
醫療AR/VR國際創新服務聯盟
國際交流
國際合作實績
海外共研基地/中心
東南亞國際培訓課程
求才資訊
填寫徵才表單
職缺列表
聯絡我們
首頁
創新研究
研究成果
重點研究領域
核心實驗室
研究成果
實施場域
論文產出
新創公司
研究成果
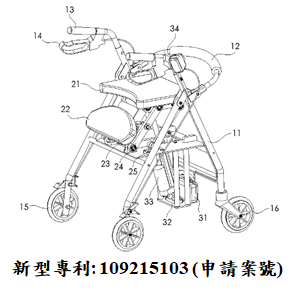
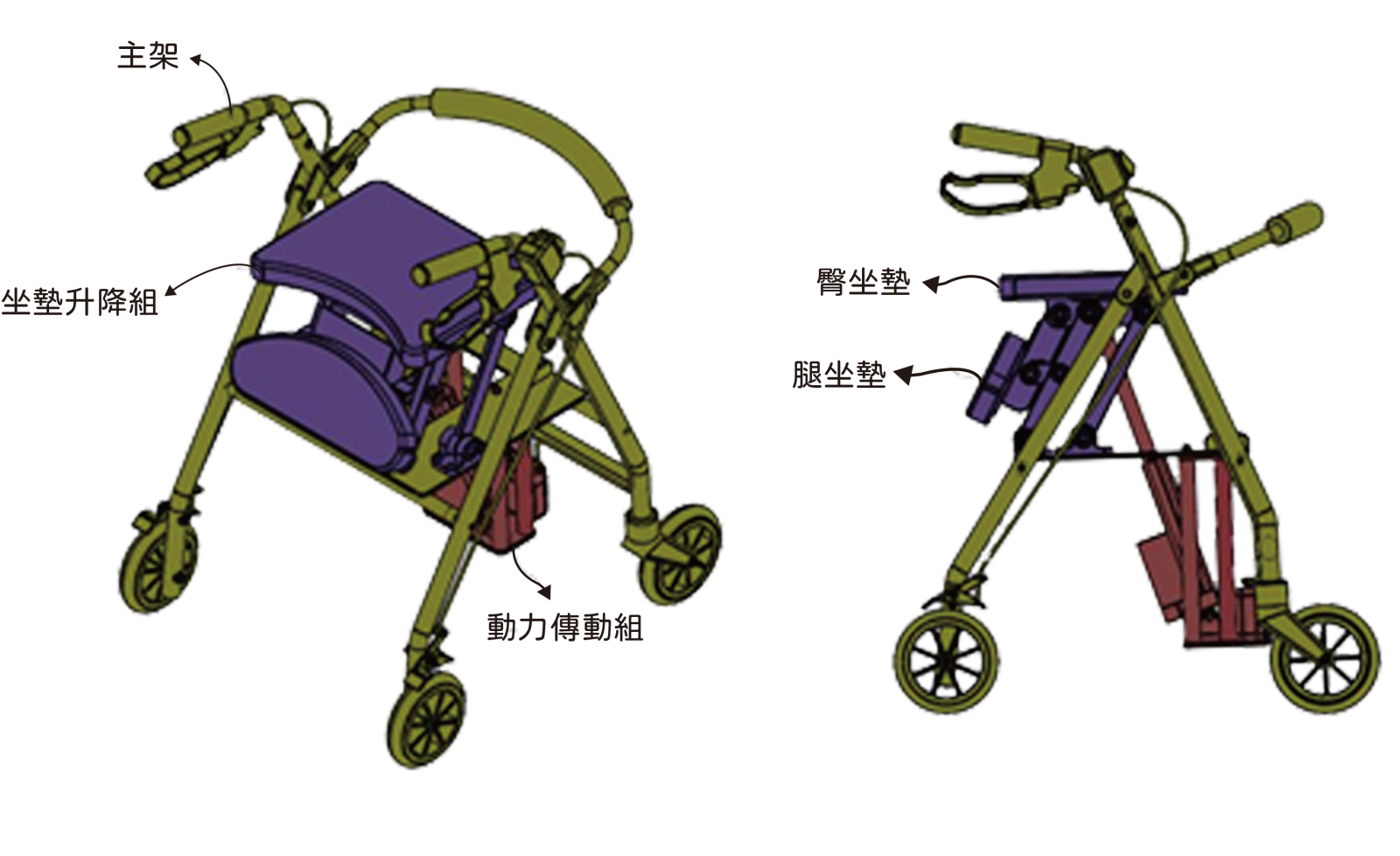
被動型態移動輔具開發
從坐到站遠比步行難
外骨骼機器人無法提供平衡功能,需要額外輔具。
產品設計
升降行程:離地255-405mm
驅動電壓:24V
重量:15.6kg
使用示意圖
返回
COPYRIGHT © 2020前瞻醫療器材科技中心ALL RIGHTS RESERVED.
Designed by jstardesign